Instrument: Robotic Positioners
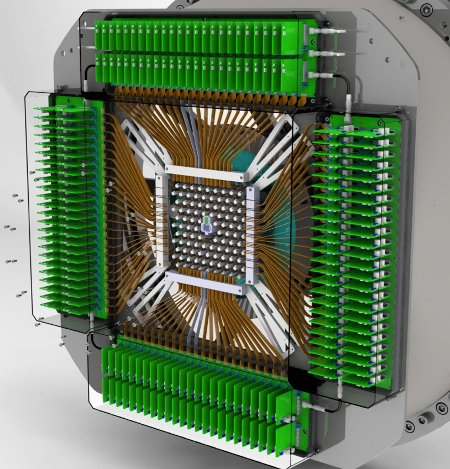
The positioner system (developed by AVS) consists of 100 identical
positioners that will be distributed on the 3.5 arcmin x 3.5 arcmin
(on sky) area around the LCB IFU bundle, as shown in the figure. The
positioning of the fiber optical bundle is performed combining the
interpolation of two rotations. The interpolation between the
rotation 1 and rotation 2 allows covering the area assigned to each
actuator.
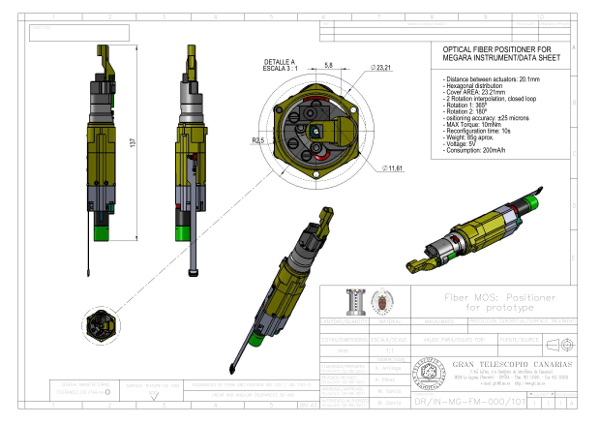
The positioner design (Detailed-Design level) is shown in the
drawing at the bottom of this page. The main characteristics of the
fiber positioner are summarized in the image shown in the left panel
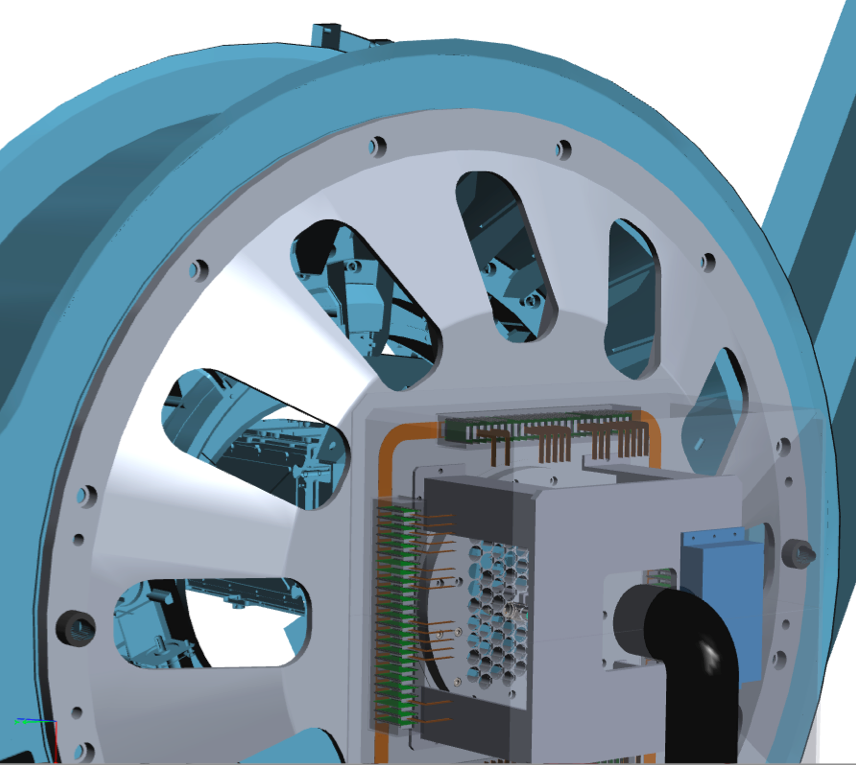
below. An image and movie of the Preliminary-Design protoype is
shown at right.
 |
 (Click on the
image to play a movie of the MEGARA robotic positioner prototype
in a mock-up model of the whole MEGARA MOS system) (Click on the
image to play a movie of the MEGARA robotic positioner prototype
in a mock-up model of the whole MEGARA MOS system) |
The main characteristics of the fiber positioner are summarized in the following table:
| Distance between actuators: |
20.1mm |
| Hexagonal distribution |
| Covered area: |
a circular area of 23.21 mm in diameter |
| 2 Rotation interpolation, closed loop |
| Rotation 1 range: |
365o |
| Rotation 2 range: |
180o |
| Positioning accuracy: |
± 25 microns |
| Maximum torque: |
10 mNm |
| Reconfiguration time: |
10 s |